






SeaLitterBot nace como solución a los problemas que generan los residuos plásticos en los recursos marinos y la sostenibilidad del planeta. Esta nueva plataforma se basará en uno de los métodos más eficientes de recogida de basuras marinas: red remolcada desde una embarcación; pero tratando de reducir el impacto del consumo energético, el factor más limitante a la hora de aplicar esos métodos cuando se trabaja con plataformas autónomas.
Objetivos del Proyecto
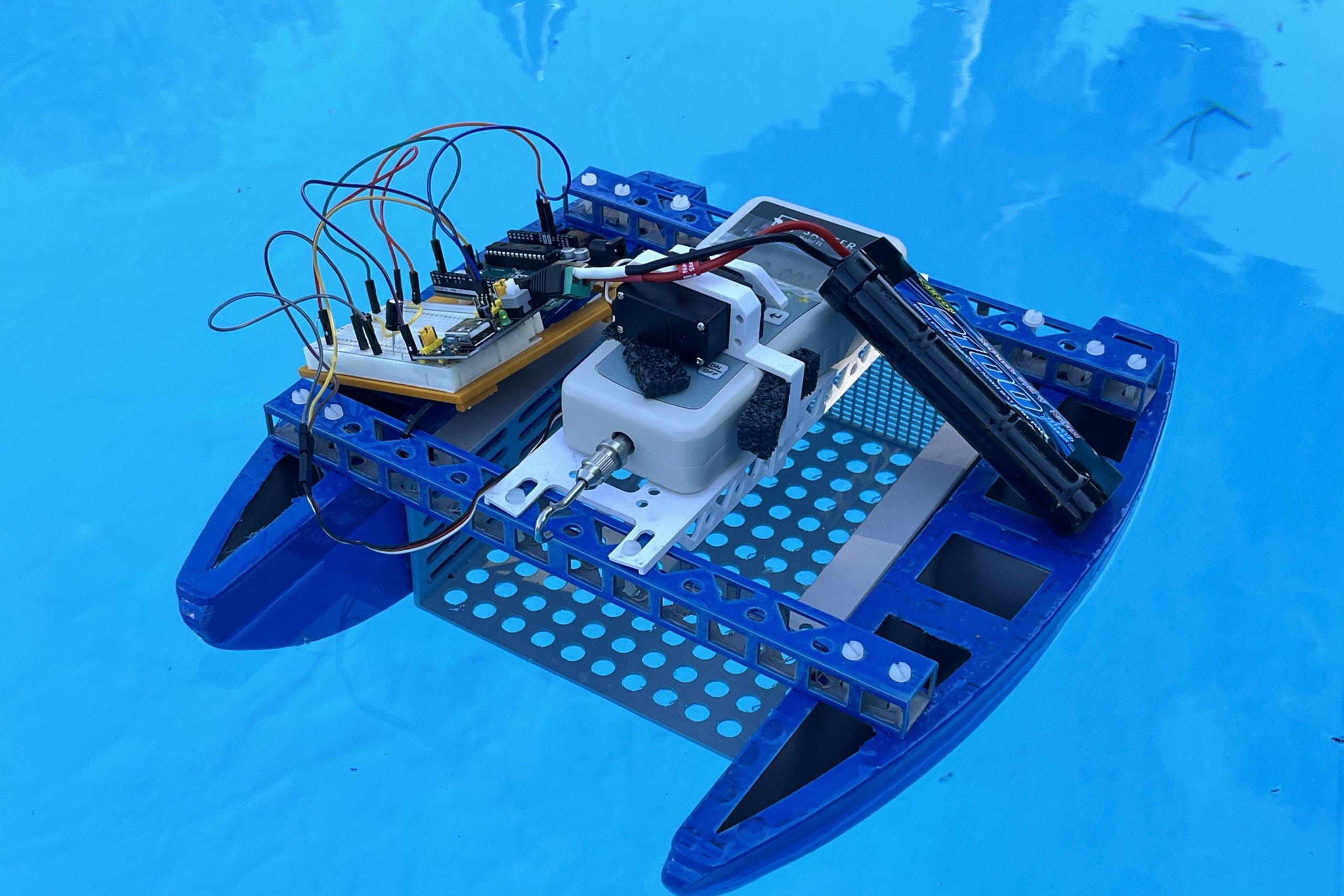
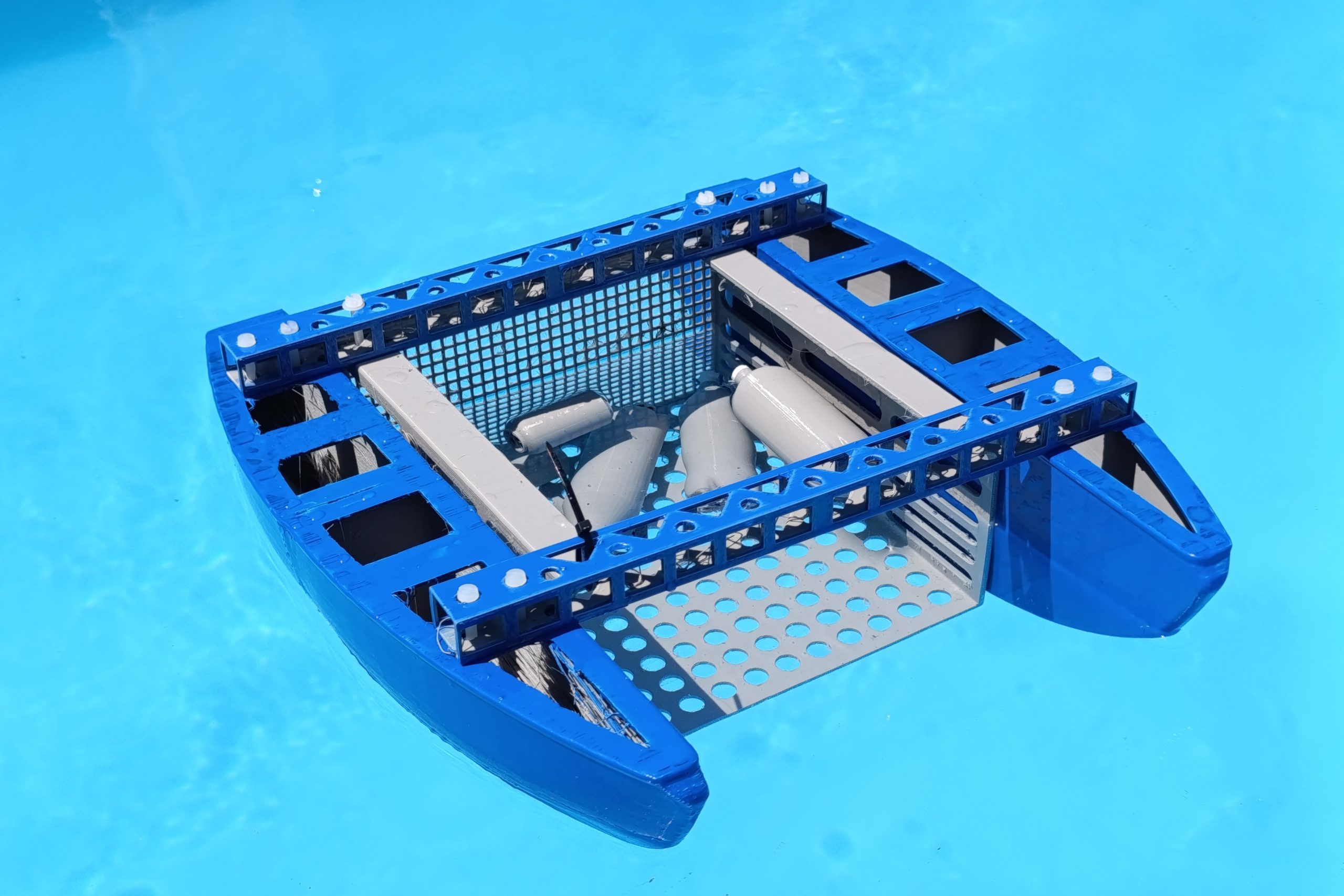
Objetivo 1. Desarrollo de una plataforma compacta con capacidad de navegación en
superficie con alta maniobrabilidad y optimizada para movilidad en espacios reducidos y con
obstáculos, garantizando aspectos ergonómicos
Objetivo 2. Integrar un sistema de recogida y almacenamiento de residuos plásticos marinos
(accionamiento, tambor, red, depósito, …): Que minimice la resistencia al avance del robot,
que tenga un volumen de almacenamiento mínimo de 200 dm3 y tamaños de malla que
permitan recoger diferentes tamaños de plástico.
Objetivo 3. Integrar un sistema de control y navegación, con modo de funcionamiento y
navegación por control remoto (mando de radiofrecuencia) además del modo autónomo
basado en algoritmos de inteligencia artificial para detección de plásticos en superficie
mediante visión, detección de obstáculos y optimización de trayectorias.
Objetivo 4. Integrar un sistema modular de sensores intercambiables
Objetivo 5. Realizar una prueba de concepto experimental en entorno relevante
Objetivo 6. Incrementar el grado de concienciación y sensibilización de la sociedad de la
importancia de los recursos naturales marinos para la sostenibilidad del planeta y su
implicación en el mantenimiento, y contribuir de esa manera a la conservación de
ecosistemas marinos y costeros.
Implementación del Proyecto
Para cumplir los principales objetivos del proyecto se propone un plan de trabajo sencillo dividido en cuatro paquetes de trabajo (PT). La gestión del proyecto se llevará a cabo en el PT1. El PT2 está dedicado a la investigación industrial del sistema de recogida, diseño, fabricación de prototipos y prueba de los subsistemas y componentes. En el PT3 se llevará a cabo un análisis de viabilidad del futuro proyecto SeaLitterBot. Por último, en el PT4 se llevarán a cabo las tareas de comunicación, difusión y, gestión de propiedad intelectual.
Resultados Esperados
El proyecto tendrá un impacto ambiental y social positivo en las Islas Baleares. Ambientalmente, contribuirá a la limpieza de los océanos, eliminando plásticos y microplásticos que afectan la fauna marina y la salud humana. Promoverá la concienciación sobre la sostenibilidad de los recursos marinos y reducirá las emisiones de CO2 mediante el diseño eficiente del robot. Socialmente, fomentará la innovación tecnológica, creará empleo, y contribuirá al desarrollo de una economía basada en productos de alta tecnología en España. Además, ofrecerá acceso abierto a los resultados del proyecto y adoptará políticas de igualdad de género, promoviendo la participación femenina en ciencia y tecnología.
