Proceso de fabricación de Microlayer Sample
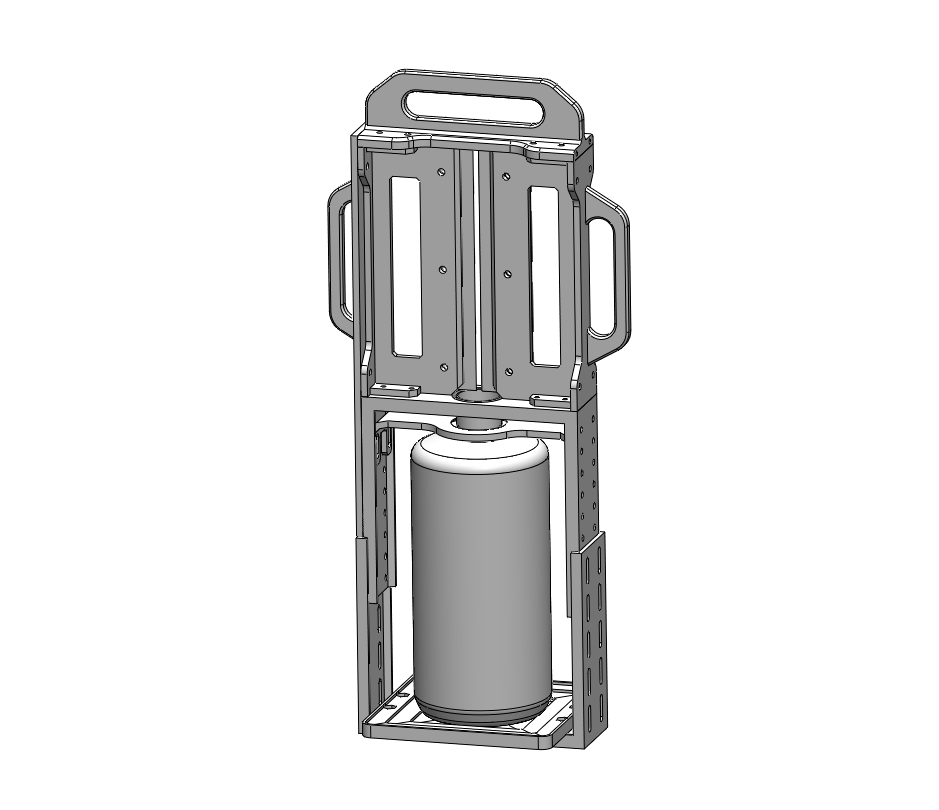
En este caso, mostramos cómo fabricamos paso a paso un microlayer sample, un equipo diseñado específicamente para recoger muestras de la capa más superficial del agua. Esta fina película que separa el agua del aire es clave para estudiar el medio ambiente, y para capturarla de forma precisa se necesitan herramientas muy concretas. #Fabricacion #Impresion3D #Diseño3D #Muestreo #MedioAmbiente #Tecnologia #Ciencia
Fabricación de pieza para un compartimento estanco

Compartimos los detalles del proceso de diseño y fabricación a medida de una pieza técnica desarrollada a medida para solucionar los requisitos de sellado y aislamiento de un compartimento estanco. A través de este contenido audiovisual mostramos la precisión requerida en el ajuste de las tolerancias para garantizar la estanqueidad absoluta del conjunto en condiciones de uso reales.
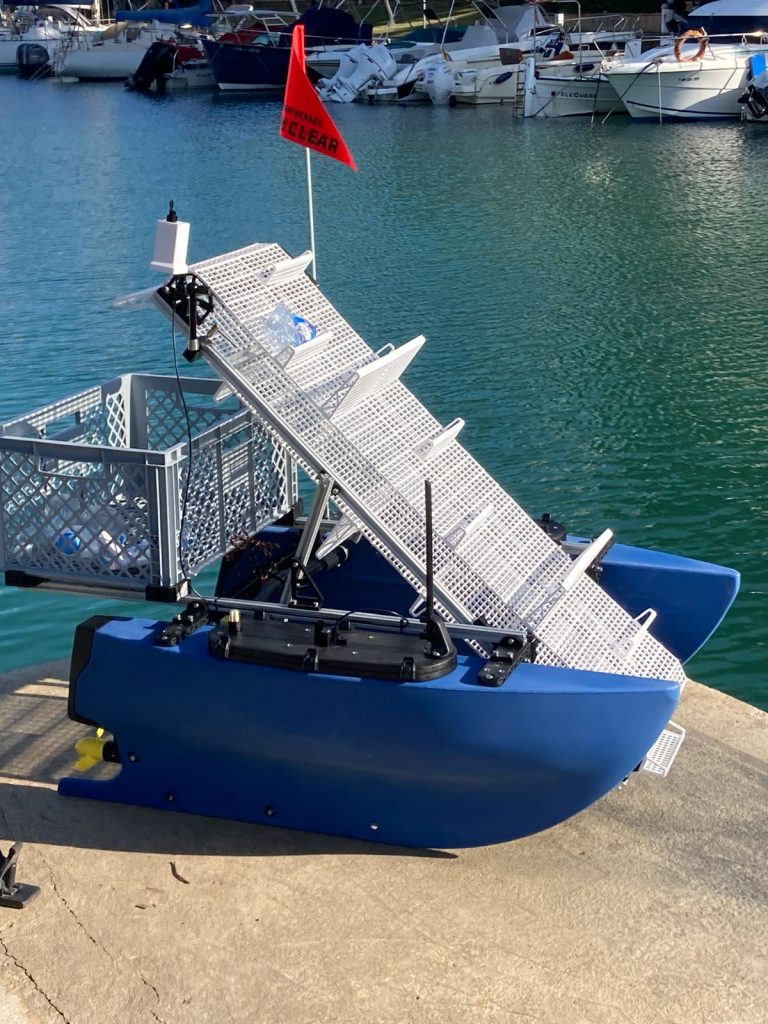
Rendimiento de SeaLitterBot en un entorno portuario

Ya está disponible el vídeo con el resultado final del proyecto SeaLitterBot, donde se muestran las pruebas de funcionamiento real realizadas en el Puerto de Santa Ponça. Esta iniciativa ha sido financiada por la Unión Europea a través de los fondos NextGenerationEU, en el marco del Plan de Recuperación, Transformación y Resiliencia del Ministerio de Industria y Turismo, y gestionada por la Direcció General de Turisme de la Conselleria de Turisme, Cultura i Esports. Compartimos este documento audiovisual, realizado por la Agencia de Estrategia Turística de les Illes Balears (AETIB), para mostrar el rendimiento del sistema en el entorno portuario.
¿Cómo se hizo el prototipo de SeaLitterBot?

«Making of» del prototipo de SeaLitterBot, aprovechando tecnología de impresión 3D: El resultado final:
Uso de software avanzado para desarrollo de nuevos productos
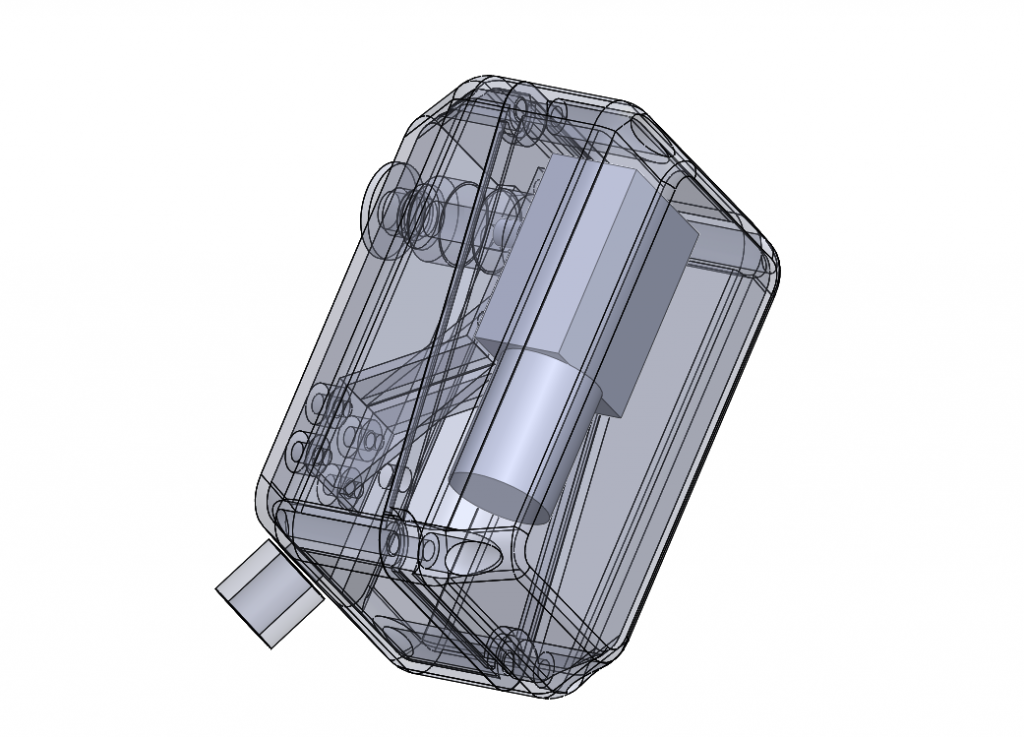
Cuando desarrollamos un nuevo producto utilizamos software avanzado de diseño mecánico 3D (CAD) para diseñar piezas e integrar componentes dentro del ensamblaje para su validación. Aquí podeis ver el diseño del compartimento para el motor actuador de la cinta de nuestro SeaLitterBot:
Generación de misiones a partir de puntos GPS concretos

Nuestro equipo BlueBoat permite la generación de misiones tanto a partir de puntos GPS concretos o a partir de una región o zona a estudiar y ver la posición y datos en tiempo real. Puedes: – Crear misiones desde puntos GPS exactos– Definir regiones completas a estudiar– Ver posición y datos en tiempo real
Realización de batimetrías y estudios del fondo marino

Nuestro equipo BlueBoat también dispone de altímetro (sonda acústica monohaz) para realización de batimetrías y estudios del fondo marino. Mapea profundidades, analiza el terreno y convierte datos invisibles en información estratégica.
Proyecto de sistema de recogida de residuos plásticos marinos finalizado
Finalizamos el desarrollo del sistema de recogida de residuos plásticos marinos. Cerramos una etapa clave del #ProyectoSeaLitterBot, con la fabricación del prototipo diseñado para actuar en entornos marinos y las pruebas y validación en el Club Náutico de Santa Ponsa. Un avance hacia tecnologías más limpias y sostenibles para cuidar nuestros mares.
Primeras pruebas en el mar con la plataforma BlueBoat

En el Club Náutico de Santa Ponsa realizamos las primeras pruebas de la plataforma BlueBoat de Blue Robotics, que servirá de base para montar el sistema de recogida de residuos plásticos marinos del proyecto SeaLitterBot. Un paso importante hacia soluciones sostenibles en nuestros mares.
Fabricación y comprobación del funcionamiento del prototipo a escala del sistema de recogida de residuos plásticos marinos

Hemos fabricado y comprobado con éxito el funcionamiento del prototipo a escala del sistema de recogida de residuos plásticos marinos. Un avance clave dentro del proyecto SeaLitterBot, que nos acerca a soluciones reales para proteger nuestros mares.